基于表面的刚体配准¶
1 点云配准¶
点云配准的核心任务,是将两个在不同坐标系或视角下扫描得到的点云(通常称为源点云 P 和目标点云 Q)对齐。这需要找到一个最优的刚体变换(旋转矩阵R和平移向量t),使得两片点云在重叠区域内的整体误差最小。
常见点云配准算法框架有两类:ICP(Iterative Closest Point,迭代最近点) 和 NDT(Normal Distributions Transform,正态分布变换)。
| 特性 | ICP (迭代最近点) | NDT (正态分布变换) |
|---|---|---|
| 核心 思想 |
最小化点对距离:迭代地寻找最近点并最小化对应点间的距离。 | 最大化概率似然:将目标点云表示为概率场,寻找使源点云在该场中概率最大的变换。 |
| 数据 结构 |
依赖KD-Tree等加速最近邻搜索。 | 将空间划分为固定网格(体素),每个网格存储一个概率分布参数。 |
| 对应 关系 |
显式对应:为每个源点找到目标点云中的一个对应点。 | 隐式对应:源点通过概率密度函数与目标点云的局部区域相关联,无一一对应的点。 |
| 初值 要求 |
较高。容易因错误的最近点对应而陷入局部最优。 | 相对较低。概率表示更为平滑,对初始位置的容忍度更好。 |
| 计算 速度 |
每次迭代需搜索最近点,计算量较大。 | 预处理(建网格、计算分布)后,配准过程通常更快,因为无需动态搜索最近邻。 |
| 抗噪性 | 对噪声和离群点较敏感,通常需要搭配鲁棒策略。 | 抗噪性较好,因为概率分布本身对离群点不敏感。 |
| 对点 密度 |
敏感,点密度差异大会影响匹配质量。 | 不敏感,只要网格内有足够点来估算分布即可。 |
| 适用 场景 |
1. 高精度工业检测。 2. 计算机辅助医疗。 3. 三维重建后期精配准。 |
1. 机器人定位与SLAM。 2. 自动驾驶环境感知。 |
-
ICP 更直观,讲究“精准对位”,适合数据干净、目标明确、有大致初始位置的场景,比如:医疗手术导航(把实时影像对准术前CT)和工业零件检测(把扫描的工件和CAD模型对齐)中。
-
NDT 擅长处理“不可控、嘈杂、大范围、初值未知”,通过概率表示,提供了更平滑、更鲁棒的配准场,适合在环境“不可控”、数据“又吵又乱”、范围还很大的场景,比如:自动驾驶的激光雷达定位和机器人同步建图与定位(SLAM)。
2 基于表面的刚体配准¶
在计算机辅助医疗导航中,一个非常典型的配准问题是术前影像与术中物理空间之间的对齐。
-
术前 → 通过 CT 扫描重建出患者骨骼的三维表面模型(通常以 STL 或三角网格形式表示)
-
术中 → 通过带有定位系统的探针,在真实骨表面上采集一组离散的空间点。
这类问题通常被建模为 基于表面的刚体配准(surface-based rigid registration):在刚体假设下,估计一个空间变换,使术中采集的点集能够与术前重建的骨表面在几何意义上最佳对齐。
由于术中探针只能接触到骨表面的局部区域,且采集到的是稀疏、不规则分布的点集(点数稀疏、覆盖范围有限、噪声较大),而术前模型则为高分辨率的完整骨表面,二者在初始状态下往往存在较大的位姿差异。在此条件下,单一的局部配准算法(如 ICP)容易陷入局部最优,难以保证稳定收敛。
因此,实际系统中通常采用分层式配准策略:首先通过解剖标志点获得一个几何意义明确的粗配准,将两坐标系对齐到相同数量级;随后使用对初始误差更具鲁棒性的 NDT 方法进行概率意义下的粗到中等精度配准;最后在较小误差范围内,利用 ICP 算法进行高精度的局部优化,从而实现稳定而精确的刚体配准结果。
2.1 术前模型构建¶
通过 CT 扫描重建患者骨骼的三维表面模型(STL 或三角网格),并在术前影像空间中完成必要的标注与模型准备,包括解剖标志点的选取与定义,为后续的术中初始配准提供参考。
2.2 基于标志点的初始配准¶
通过在术前模型与术中物理空间中分别采集对应的解剖标志点,建立两坐标系之间的初始对应关系。基于这些稀疏但具有明确语义一致性的点对,可直接求解一个刚体变换,用作后续表面配准的初始位姿估计。
解剖标志点仅用于初始位姿估计,其数量有限且不参与后续基于表面误差的优化过程。
bool SurgaceReg::CoarseRegistration(
vtkSmartPointer<vtkPoints> sourcePoints, vtkSmartPointer<vtkPoints> targetPoints,
vtkSmartPointer<vtkMatrix4x4> coarseMatrix)
{
int nbSourcePoints = sourcePoints->GetNumberOfPoints();
int nbTargetPoints = targetPoints->GetNumberOfPoints();
if (nbSourcePoints != nbTargetPoints || nbSourcePoints < 3) {
return false;
}
vtkNew<vtkLandmarkTransform> landmarkTrans;
landmarkTrans->SetModeToRigidBody();
landmarkTrans->SetSourceLandmarks(sourcePoints);
landmarkTrans->SetTargetLandmarks(targetPoints);
landmarkTrans->Update();
coarseMatrix->DeepCopy(landmarkTrans->GetMatrix());
return true;
}
2.3 术中表面点采集¶
使用带定位系统的探针在真实骨表面进行扫描,采集一组稀疏、局部的三维表面点,作为待配准的源点云。
2.4 预处理¶
-
对术前模型进行平移归一化,将其置于计算中心。
-
根据术中点的范围裁剪感兴趣区域(ROI),排除无关结构干扰。
-
对裁剪后的网格进行表面加密采样,生成用于配准的稠密表面点云。
-
基于探针点到最近表面点的方向关系,进行若干次仅含平移的对齐,减小初始位姿误差并提升后续算法的收敛稳定性。
// 在粗配准结果基础上,通过最近邻搜索估计点云间的平均平移偏差,并迭代修正位姿中的平移分量,以降低初始配准的系统性偏移。
Eigen::Matrix4f RegistrationMathUtils::RefineTranslationByNearestNeighbor(
pcl::PointCloud<pcl::PointXYZ>::Ptr source, pcl::PointCloud<pcl::PointXYZ>::Ptr target,
double distanceThreshold, int maxIterations)
{
Eigen::Matrix4f initTransform = Eigen::Matrix4f::Identity();
if (!source || !target || source->empty() || target->empty()) {
return initTransform;
}
// KD-tree on target cloud
pcl::search::KdTree<pcl::PointXYZ> targetTree;
targetTree.setInputCloud(target);
std::vector<int> indices(1);
std::vector<float> sqrDistances(1);
// 当前变换(只更新平移)
Eigen::Matrix4f currentTransform = initTransform;
pcl::PointCloud<pcl::PointXYZ> transformedSource;
pcl::transformPointCloud(*source, transformedSource, currentTransform);
int iter = 0;
double meanDistance = std::numeric_limits<double>::max();
while (meanDistance > distanceThreshold && iter < maxIterations) {
pcl::PointCloud<pcl::PointXYZ> directionCloud;
directionCloud.reserve(transformedSource.size());
std::vector<float> distances(transformedSource.size());
// 最近邻 + 位移向量
for (size_t i = 0; i < transformedSource.size(); ++i) {
if (targetTree.nearestKSearch(transformedSource[i], 1, indices, sqrDistances) > 0) {
const pcl::PointXYZ & nearest = target->points[indices[0]];
pcl::PointXYZ dir;
dir.x = nearest.x - transformedSource[i].x;
dir.y = nearest.y - transformedSource[i].y;
dir.z = nearest.z - transformedSource[i].z;
directionCloud.push_back(dir);
distances[i] = std::sqrt(sqrDistances[0]);
}
}
if (directionCloud.empty()) {
break;
}
// 平均位移
Eigen::Vector4f meanShift;
pcl::compute3DCentroid(directionCloud, meanShift);
// 只更新 translation
currentTransform(0, 3) += meanShift[0];
currentTransform(1, 3) += meanShift[1];
currentTransform(2, 3) += meanShift[2];
// 重新变换 source
pcl::transformPointCloud(*source, transformedSource, currentTransform);
// 计算 mean NN distance
meanDistance = std::accumulate(distances.begin(), distances.end(), 0.0) / distances.size();
++iter;
}
return currentTransform;
}
2.5 基于概率模型的中等精度配准(NDT)¶
采用正态分布变换(NDT)方法,在概率意义下对两组点云进行对齐,实现对初始误差较为鲁棒的全局或半全局配准。为减小参数选择对结果的影响,可在不同模型尺度下并行执行 NDT,并筛选误差较小的若干候选位姿。
QList<RegistrationCandidate> NDTMultiScaleRegistrar::Register()
{
qInfo() << "NDTMultiScaleRegistrar start.";
QElapsedTimer timer;
timer.start();
double sourceCloudResolution = ComputeCloudResolution(m_SourceCloud, m_Config.kForResolution);
double targetCloudResolution = ComputeCloudResolution(m_TargetCloud, m_Config.kForResolution);
double minResolutionRatio = m_Config.minResolution;
double maxResolutionRatio = m_Config.maxResolution;
minResolutionRatio = std::floor(targetCloudResolution * 10.0) / 10.0 + 0.2;
if (minResolutionRatio > maxResolutionRatio) {
maxResolutionRatio = minResolutionRatio + 1.0;
}
double resolutionStep = m_Config.resolutionStep;
int resolutionNum = static_cast<int>(std::floor((maxResolutionRatio - minResolutionRatio) / resolutionStep));
resolutionNum = std::max(1, resolutionNum + 1);
qInfo() << "Source Cloud Resolution: " << sourceCloudResolution;
qInfo() << "Target Cloud Resolution: " << targetCloudResolution;
qInfo() << "NDT Multi-Scale minResolution: " << minResolutionRatio
<< ", maxResolution: " << maxResolutionRatio
<< ", resolutionStep: " << resolutionStep
<< ", resolutionNum: " << resolutionNum;
QList<NDTJob> jobList;
for (int i = 0; i < resolutionNum; i++) {
NDTJob job;
job.resolution = minResolutionRatio + i * resolutionStep;
job.stepSize = job.resolution / 10.0;
pcl::copyPointCloud(*m_SourceCloud, job.sourceCloud);
pcl::copyPointCloud(*m_TargetCloud, job.targetCloud);
job.initMatrix = m_InitialTransform;
jobList.append(job);
}
QFuture<QList<NDTResult>> future = QtConcurrent::mappedReduced(jobList, RunNDTRegistration, CollectValidNDTResult);
future.waitForFinished();
QList<NDTResult> ndtResults = future.result();
std::sort(ndtResults.begin(), ndtResults.end(), CompareNDTResultByScore);
QList<RegistrationCandidate> candidates;
double minScore = ndtResults[0].score;
for (int i = 0; i < m_Config.acceptResultMaxNum; i++) {
if (ndtResults[i].score < minScore * 1.5) {
RegistrationCandidate candidate;
candidate.matrix = ndtResults[i].matrix;
candidate.score = ndtResults[i].score;
candidates.append(candidate);
} else {
break;
}
}
qint64 elapsedMs = timer.elapsed();
qInfo() << "NDTMultiScaleRegistrar time(ms): " << elapsedMs;
return candidates;
}
NDTResult RunNDTRegistration(NDTJob paras)
{
NDTResult result;
pcl::PointCloud<pcl::PointXYZ>::Ptr outputCloud(new pcl::PointCloud<pcl::PointXYZ>);
try {
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
ndt.setTransformationEpsilon(1e-10); // 为终止条件设置最小转换差异
ndt.setTransformationRotationEpsilon(1 - 1e-5);
ndt.setMaxCorrespondenceDistance(1.0);
ndt.setOulierRatio(0.9);
ndt.setEuclideanFitnessEpsilon(1e-5);
ndt.setMaximumIterations(10000);
ndt.setInputSource(paras.sourceCloud.makeShared()); // 源点云
ndt.setInputTarget(paras.targetCloud.makeShared()); // 目标点云
ndt.setStepSize(paras.stepSize); // more-thuente 线搜索最大步长
ndt.setResolution(paras.resolution); // NDT网格网格结构的分辨率
ndt.align(*outputCloud, paras.initMatrix);
result.valid = true;
result.matrix = ndt.getFinalTransformation();
result.resolution = paras.resolution;
result.stepSize = paras.stepSize;
result.score = ndt.getFitnessScore();
} catch (const std::exception &) {
result.valid = false;
}
return result;
}
2.6 基于最近邻优化的高精度配准(ICP)¶
在 NDT 输出的候选位姿基础上,使用基于最近邻的点到点 ICP 算法进行局部精配准。通过对多个初始位姿并行优化,进一步降低陷入局部最优的风险,从而获得高精度的刚体配准结果。
ICPResult RunICPRegistration(const ICPJob & job, const ICPMultiInitRegistrar::ICPConfig & cfg)
{
ICPResult result;
try {
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
pcl::PointCloud<pcl::PointXYZ> aligned;
icp.setInputSource(job.sourceCloud.makeShared());
icp.setInputTarget(job.targetCloud.makeShared());
icp.setMaxCorrespondenceDistance(cfg.maxCorrespondenceDistance);
icp.setMaximumIterations(cfg.maxIterations);
icp.setTransformationEpsilon(cfg.transformationEpsilon);
icp.setTransformationRotationEpsilon(cfg.rotationEpsilon);
icp.setEuclideanFitnessEpsilon(cfg.fitnessEpsilon);
icp.align(aligned, job.initMatrix);
if (icp.hasConverged()) {
result.valid = true;
result.matrix = icp.getFinalTransformation();
result.score = icp.getFitnessScore();
}
} catch (const std::exception &) {
result.valid = false;
}
return result;
}
RegistrationCandidate ICPMultiInitRegistrar::Register()
{
QElapsedTimer timer;
timer.start();
QList<ICPJob> jobs;
for (const auto & init : m_InitialTransforms) {
ICPJob job;
pcl::copyPointCloud(*m_SourceCloud, job.sourceCloud);
pcl::copyPointCloud(*m_TargetCloud, job.targetCloud);
job.initMatrix = init;
jobs.append(job);
}
auto mapper = [&](const ICPJob & job) {
return RunICPRegistration(job, m_Config);
};
QFuture<QList<ICPResult>> future =
QtConcurrent::mappedReduced(jobs, mapper, CollectValidICPResult);
future.waitForFinished();
QList<ICPResult> results = future.result();
std::sort(results.begin(), results.end(), CompareICPResultByScore);
RegistrationCandidate candidate;
if (results.size() > 0) {
candidate.matrix = results[0].matrix;
candidate.score = results[0].score;
}
qInfo() << "ICPMultiInitRegistrar time(ms): " << timer.elapsed();
return candidate;
}
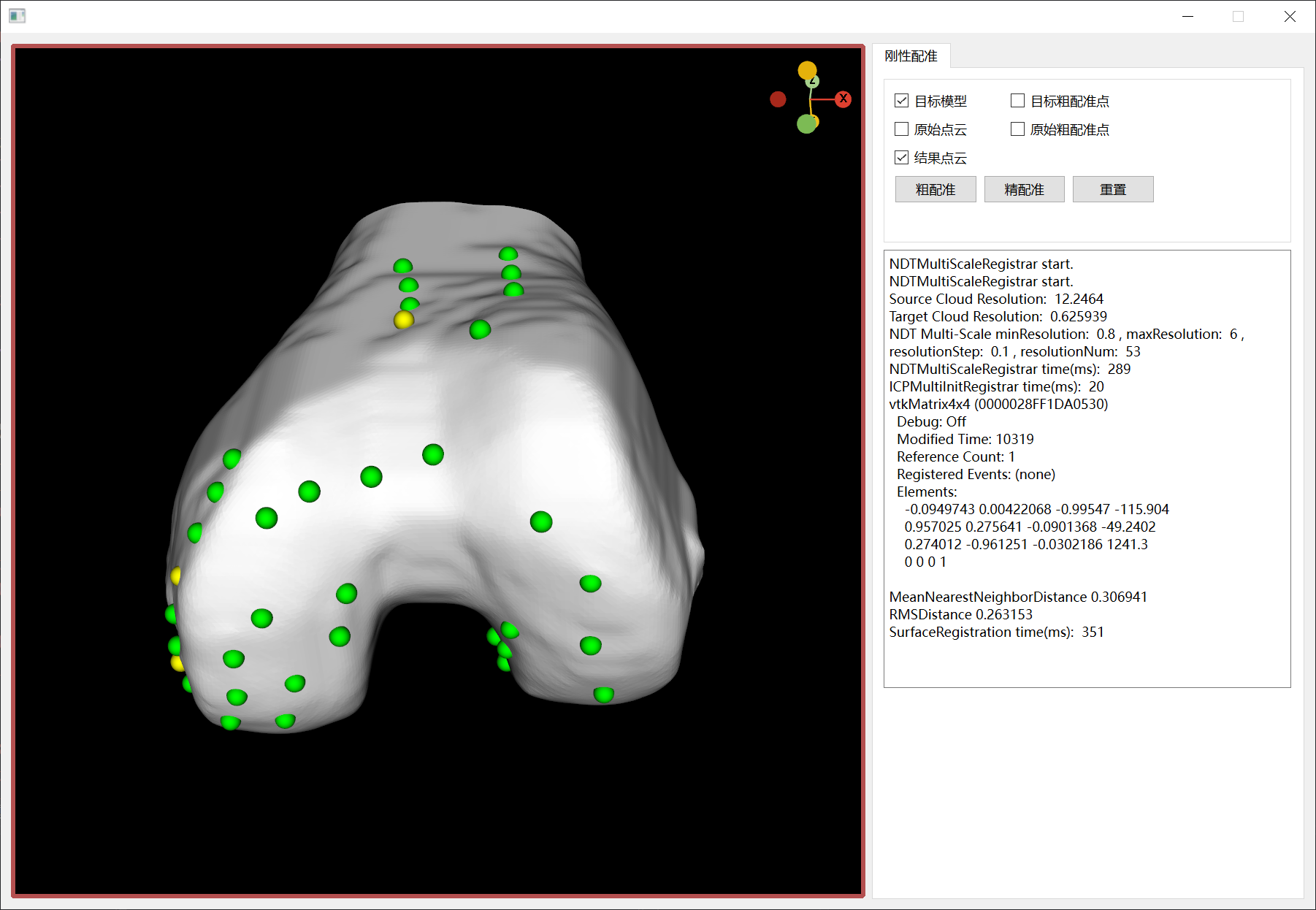
2.7 配准误差评估¶
通过计算探针点到骨表面最近点的均方根误差(RMS),对最终配准结果的精度进行定量评估。
double RegistrationMathUtils::ComputeRMSDistance(
pcl::PointCloud<pcl::PointXYZ>::Ptr source, pcl::PointCloud<pcl::PointXYZ>::Ptr target,
const Eigen::Matrix4f & matrix, double trimRatio)
{
pcl::search::KdTree<pcl::PointXYZ> tree;
tree.setInputCloud(source);
pcl::PointCloud<pcl::PointXYZ> transformed;
pcl::transformPointCloud(*target, transformed, matrix);
std::vector<double> dists;
dists.reserve(transformed.size());
std::vector<int> idx(1);
std::vector<float> sqr(1);
for (const auto & p : transformed) {
if (!pcl::isFinite(p)) {
continue;
}
if (tree.nearestKSearch(p, 1, idx, sqr) > 0) {
dists.push_back(sqr[0]);
}
}
if (dists.empty()) {
return std::numeric_limits<double>::infinity();
}
std::sort(dists.begin(), dists.end());
size_t keep = static_cast<size_t>(dists.size() * (1.0 - trimRatio));
double sum = 0.0;
for (size_t i = 0; i < keep; ++i) {
sum += dists[i];
}
return std::sqrt(sum / keep);
}